

지난 2018년 2월 9일, 평창 올림픽 개막식을 지켜보던 시청자들은 멋진 풍경을 선물 받았다. 드론 1,218대의 군집 비행으로 만들어진 오륜기가 펼쳐졌다. 비록 라이브 이벤트가 아니라 녹화 영상이긴 했지만, 관계자들은 입을 다물지 못했다고 한다. 단 한 명의 엔지니어가 수많은 드론을 조종해 그런 모습을 연출했기 때문이다. 이렇게 단순한 여러 대의 로봇을 한꺼번에 움직이는 기술을 군집 로봇 기술(Swarm robotics, 떼 로봇공학)이라고 한다.
 ▲평창 동계 스포츠 축제에서 선보인 군집 로봇 기술을 활용한 드론쇼 (출처: 인텔 홈페이지)
▲평창 동계 스포츠 축제에서 선보인 군집 로봇 기술을 활용한 드론쇼 (출처: 인텔 홈페이지)
로봇을 다루는 기술이지만, 그 뿌리는 군집 지능(Swarm Intelligence, 떼지능/무리지능)에 두고 있다. Swarm 이란 말이 벌 같은 곤충이 떼 지어 날아다니는 모습을 가리키는 것에서 알 수 있듯, 주로 흰개미 같은 사회성이 강한 곤충이나 생물이 집단으로 움직이는 모습에서 발견할 수 있는 지적 능력을 가리킨다. 집단의 사회적 구조와 상호작용 연구에 기반을 둔 인공지능을 부르는 말이기도 하다.
다양한 알고리즘을 가진 군집 로봇 개발
 ▲군집 로봇 기술은 자연의 곤충과 동물 군집에서 아이디어를 가져왔다.
▲군집 로봇 기술은 자연의 곤충과 동물 군집에서 아이디어를 가져왔다.
군집 로봇은 처음엔 이런 생물학 연구를 지원하고 검증하기 위해 쓰였다. 이 과정에서 거꾸로 군집 로봇을 제어할 수 있는 알고리즘이 만들어지게 된다. 벨기에 브뤼셀자유대 마르코 도리고 박사가 제안한 개미집단최적화 알고리즘이나, 제임스 케네디와 러셀 에버하트가 만든 입자 1군집 최적화 같은 알고리즘이 대표적이다. 로봇공학에서도 군집 로봇을 위한 알고리즘이 제시됐다. 이후 군집 로봇의 가능성을 확인한 연구자들은, 현실 문제 해결을 위한 로봇 제작에 나서게 된다.
본격적인 연구는 21세기 초에 시작됐다. 미 국방고등연구계획국(DARPA)이 지원한 센티봇과 EU가 지원한 스웜봇 프로젝트가 대표적이다. 센티봇은 위험 지역 수색 활동을 위해 만들어진 군집 로봇이었고, 스웜봇 프로젝트는 S봇이라는 스스로 떨어졌다 붙었다 하면서 모양을 바꾸는 군집 로봇을 개발했다.
미국은 나중에 군사용 드론 및 무인 함정 연구로 군집 로봇 개발을 이어간다. EU는 다양한 로봇의 협업을 연구하는 스워마노이드, 수중 모니터링 군집 로봇 개발을 위한 프로젝트 등을 계속 추진하게 된다. 이 밖에도 곤충의 페로몬 소통 방식을 모사한 페로몬 로봇이나 산봇등 다양한 알고리즘을 가진 군집 로봇이 만들어졌다.
군집 로봇, 왜 개발하는 걸까?
왜 군집 로봇을 개발하는 걸까? 앞서 말했듯 군집 로봇은 단순한 일을 수행하기 위한 로봇을 많이 모아 놓은 시스템이다. 생물의 집단 행동에서 영향을 받았기 때문이다. 비싸고 뛰어난 로봇 한 대 대신, 저렴하고 간단한 로봇을 많이 만들고 모아서 움직이게 만든다. 로봇 간 상호 감지 및 커뮤니케이션은 주로 그 로봇이 머물고 있는 영역 안에서만 이뤄진다.
집단 안에서 로봇의 행동은 로봇-로봇의 관계나, 로봇-환경의 상호작용을 통해 특정한 군집 행동으로 나타나게 된다. 아마존 물류센터에서 사용되는 물류 로봇 키바가 좋은 사례다.

▲물류 로봇 키바는 바닥의 QR코드를 지도 삼아 움직인다. (출처: CNET Korea 유튜브)
키바가 하는 일은 단순하다. 커다란 로봇 청소기처럼 생긴 이 기기는 자기가 들어야할 선반을 찾아간 다음 밑에 들어가 상단에 장착된 리프팅 장치를 이용해 지정된 장소로 선반을 들어 나른다.
단순하지만 아마존 물류센터 한 곳에서 천 대가 넘게 바삐 일하는 데도 사고가 나지 않는다. 군집 로봇 기술 때문이다. 키바는 기계적으로 간단하고 저렴한 장치다. 바닥에 부착된 QR코드를 읽어서 움직이는데, 움직임은 다른 컴퓨터에 전송되고 다른 로봇과 무선으로 공유하며 소프트웨어로 서로의 움직임을 교정한다. 배터리가 떨어지면 알아서 충전하러 돌아가기도 한다.
이처럼 군집 로봇은 간단한 로봇이 단순한 동작을 개별적으로 수행하지만 결국 큰 목적을 이룬다. 이런 장점으로 군집 로봇을 이용하면 저렴하게 에너지를 적게 쓰고 같은 작업을 여러 곳에서 동시 수행하며 상황에 맞춰 집단 크기가 바뀌고, 일부가 망가져도 안정적으로 임무를 수행하는 로봇 시스템을 만들 수 있다.
이런 특징은 채굴이나 대규모 농장 작업에 알맞고, 의료용 나노 머신이나 마이크로 로봇으로도 사용할 수 있다. 위험한 곳에 쓰기에도 좋다. 중앙에서 내리는 명령 없이 집단 내부의 커뮤니케이션만 가지고도 스스로 동작하기 때문이다.
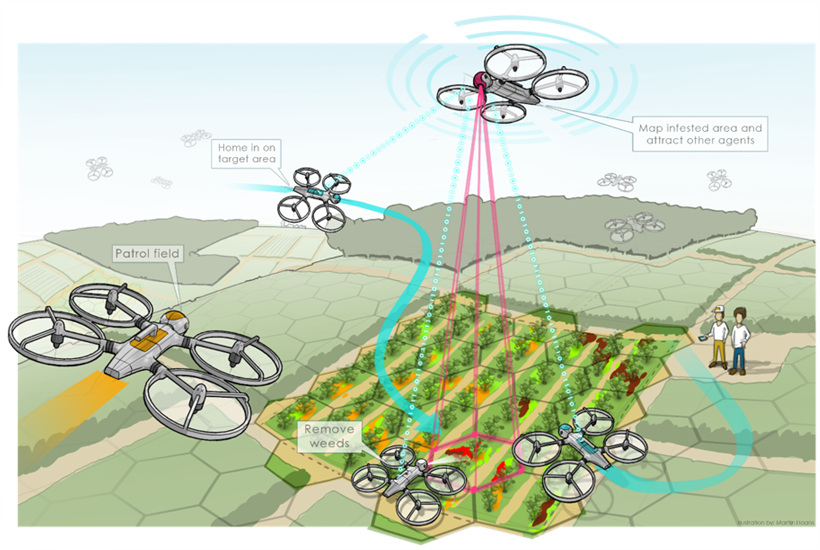 ▲SAGA 프로젝트 개념도, 군집 로봇 기술을 농업 분야에 적용하려고 한다. (출처: SAGA 공식 홈페이지)
▲SAGA 프로젝트 개념도, 군집 로봇 기술을 농업 분야에 적용하려고 한다. (출처: SAGA 공식 홈페이지)
예를 들어 EU의 지원을 받아 연구되고 있는 SAGA 프로젝트는 다수의 드론을 이용해 농지를 조사하고 잡초가 있는 위치를 파악해 제거하는 방법을 연구한다. 명현 KAIST 교수팀이 개발한 해파리 퇴치 로봇 제로스는 9마리가 동시에 움직여 해파리를 추적, 제거한다.
재해 발생 시 초기 24시간 안에 피해자를 찾기 위해 군집 로봇을 활용하자는 아이디어가 나온 적도 있다. 시스웜(Seaswarm)은 해양 기름 유출 사고시 대량으로 투입돼 기름을 제거하는 군집 로봇이다. 미 해군은 개발 중인 CARACaS 시스템을 이용해 운용하는 무인 군집 함대를 시연한 적이 있다.
군집 로봇은 어떻게 발전할까?
 ▲하버드대 킬로봇의 군집 형성 장면 (출처: https://wyss.harvard.edu/)
▲하버드대 킬로봇의 군집 형성 장면 (출처: https://wyss.harvard.edu/)
물류 로봇, 드론 쇼, 군사 분야에서 많은 가능성을 내비쳤지만 아직 군집로봇이 쓰이는 곳은 많지 않다. 다양한 문제가 실제 활용을 가로막고 있기 때문이다. 로봇 하드웨어에 대한 연구도 더 필요하고, 인간과 군집 로봇이 상호 작용할 수 있는 효과적인 방법도 찾아야 한다. 아직 가격도 비싸다. 아이러니하게 군집 지능에서 출발했고 집단 행동 연구를 지향하면서도, 현재 군집 로봇 개발에는 로봇 공학적 요소가 더 많이 사용된다. 군집 지능 연구에서 만들어진 알고리즘을 실제 도입하려 했을 때 꽤 많은 문제를 노출했기 때문이다.

▲미 국방부 산하 ‘방위고등연구계획국(DARPA)’이 주최하는 서브 T챌린지에 참가한 CoSTAR팀의 ‘바퀴형 군집 로봇’
실용성은 낮지만, 연구를 멈추지는 않는다. 2014년 미 하버드대에서 발표한 킬로봇(Kilobot)은 1024대의 작은 로봇이 알아서 움직이는 모습을 보여줘 많은 사람을 놀라게 했다. 단순한 로봇 연구가 아니라 오픈 소스로 제공되는 군집 로봇 플랫폼이다. NASA에선 우주 탐사를 위한 군집 로봇을 여전히 개발중이다. DARPA에선 지하 공간 탐색 대회에선 코스타(CoSTAR)에서 개발한 바퀴형 군집 로봇이 2위를 차지하기도 했다. roborder 같이 국경을 감시하는 군집로봇 프로젝트도 있다.
군집 로봇 기술이 가진 가능성이 분명하지는 않다. 아이작 아시모프가 1944년에 발표한 단편 ‘저 토끼를 잡아라’에서 이미 등장하긴 했지만, 생각보다 새로운 기술이다. 다만, 이젠 군집 로봇을 만드는 일이 가능할 만큼 기술이 발전했고, 일부는 실증 실험에 성공하기도 했다. 게다가 떼지어 처리하면 좋을 일이 점점 늘어나고 있다. 재난 상황에서 구조 작업, 우주 및 오지 탐색, 농업 및 광업, 수색 및 조사 등 많은 자원을 투입하거나 위험이 높은 일을 보다 쉽게 처리할 수 있다. 그리고 생태계 모니터링에도 대응할 수 있다. 점점 예상하지 못한 재난이 많아지는 상황에서 우리에겐 군집 로봇이 필요하다.
※ 이 칼럼은 해당 필진의 개인적 소견이며 삼성디스플레이 뉴스룸의 입장이나 전략을 담고 있지 않습니다.
