

인류는 자연을 닮은 기술을 끊임없이 연구해왔다. 원시인들이 사용했던 창이나 칼 등의 무기는 날카로운 발톱과 이빨을 가진 맹수들에게 영감을 얻은 것이다. 고대 그리스인들은 물고기의 날카로운 등뼈를 보고 톱을 만들었다. 거미가 먹이를 포획하는 모습을 보고 거미줄을 지혈하는 데 사용하기도 했다.
왜 인간은 자연을 닮은 기술을 연구할까? 답은 바로 ‘생존경쟁에서 살아남은 생물체들이 지닌 우수한 특성’ 때문이다. 인류는 각기 생물들이 척박한 자연환경 속에서 생존할 수 있었던 특징을 연구함으로써 인간에게는 없는 부분을 보완할 수 있게 됐다.
동물의 우수한 특성을 닮은 생체모방 로봇
‘생체모방(Biomimetics)’이란 다양한 생물의 특성이나 구조 등을 모사한 기술을 뜻한다. 생명을 뜻하는 ‘바이오(Bio)’와 모사, 모방을 의미하는 ‘미메틱(mimetic)’라는 단어를 합성한 용어다.
최근 과학계에서는 로봇에 생체모방 기술을 적용하는 연구가 활발하다. ‘생체모방 로봇(Biomimetric Robot)’은 인간이 가지고 있지 않는 자연의 생존력과 효율성, 장점 등을 로봇으로 구현한 것이다. 생체모방 로봇에는 동물들이 오랜 시간 축적해온 자신만의 ‘생존 비법’이 담겨있다고 할 수 있다.

생체모방 동물 로봇에 대표적인 동물은 바로 ‘뱀’이다. 뱀은 생체모방 로봇에 기본이 되는 동물이다. 물속을 자유롭게 이동하는 수륙양용 로봇이나 팔 형태의 로봇(robot arm) 등 뱀의 이동성을 모방한 뱀 로봇은 다양하다.
뱀 로봇은 갈라진 틈이나 좁은 길, 울퉁불퉁한 표면을 쉽게 이동할 수 있어 구조 대원이 진입하기 어려운 붕괴된 건물 안이나 파열된 상하수도 배관 등 재해 현장에서 활용할 수 있다. 멕시코시티에서는 지난 2017년 지진 구조 현장에 뱀 로봇을 투입하기도 했다.

▲왕 뱀의 이동 원리를 적용한 ‘뱀 로봇’ (출처: SciTech Daily 유튜브)
지난 2월 미국 존스 홉킨스 대학 연구진은 비정형의 대형 장애물이 있는 지형도 쉽게 이동할 수 있는 '뱀 로봇(snake robot)'을 개발했다. 연구진은 ‘왕뱀(kingsnake)’의 동작을 모사했다고 밝혔다.
최근 뱀 로봇은 소프트 로봇으로도 진화하고 있다. 로봇이라고 다 딱딱하고 무겁다는 편견은 버려야 한다. 금속을 사용하지 않고 실리콘처럼 부드러운 재료로 만든 소프트 로봇에 대한 연구가 최근 활발하게 진행되고 있다.
미국 하버드 존 폴슨 공학 응용과학대학(SEAS) 연구팀은 뱀 비늘에서 영감을 얻은 소프트 로봇을 개발했다. 뱀은 앞으로 포복하기 위해서 피부의 비늘을 사용한다. 연구팀은 뱀 비늘을 모사한 인공피부와 소프트 액추에이터로 뱀이 비늘을 이용해 전진하는 것과 같은 효과를 얻었다.
말랑말랑한 소프트 로봇의 크기를 작게 만든다면 복강경 치료 등 의료 분야의 검사 및 탐사, 모니터링, 수색이 가능해진다. 소프트 로봇은 부드러운 외형으로 신체에 위해를 가하기 힘들다는 강점이 있기 때문에 앞으로 더욱 중요한 연구 분야다.
인간에게 친숙한 동물, 4족 보행 로봇의 개발
 ▲4족 보행 로봇인 ‘미니 치타’ 로봇 (출처: https://www.naverlabs.com/
▲4족 보행 로봇인 ‘미니 치타’ 로봇 (출처: https://www.naverlabs.com/
생체모방 로봇에 4족 보행 로봇을 빼놓을 수 없다. 빠르게 달릴 수 있는 4족 보행 로봇은 군사 분야와 산업재해 현장에서 각광받는 생체모방 로봇이다. 양서류와 같은 특이한 형태의 4족 보행 로봇도 있다.
미국 매사추세츠공대(MIT) 생체모방 로보틱스 연구소장인 김상배 MIT 기계공학부 교수는 운동 지능 로봇인 ‘스티키 봇(Stickybot)’과 ‘미니 치타(Cheeta)’를 개발했다.
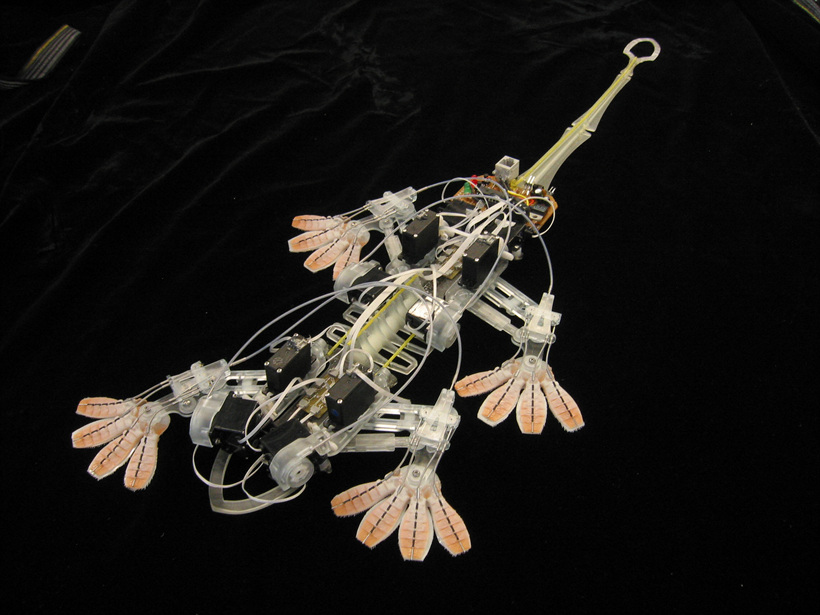 ▲도마뱀의 이동 원리를 모방한 ‘스티키 봇’ (출처: National Science Foundation 갤러리)
▲도마뱀의 이동 원리를 모방한 ‘스티키 봇’ (출처: National Science Foundation 갤러리)
스티키 봇은 도마뱀의 이동 원리를 생체학적으로 모방한 로봇이다. 스티키 봇은 중앙아시아, 아메리카 대륙 등에 서식하는 ‘게코(gecko, 도마뱀붙이)’의 특수한 발바닥 구조를 모사해 개발됐다.
게코의 발바닥에는 사람의 손금처럼 작은 주름이 있는데 이 주름은 빳빳한 털로 덮여있다. 게코는 발바닥 강모에 있는 나노 빨판이 표면과 접촉하는 힘을 이용해 쉽게 벽을 타고 오른다. 강력한 빨판의 힘으로 천장에 거꾸로 붙어있을 수도 있다.
스티키 봇은 게코의 이러한 특징을 그대로 적용했다. 스티키 봇은 발바닥에 나노 크기의 털이 부착되어 있어 초당 4센티미터의 속도로 벽을 오를 수 있다. 스티키 봇은 지난 2006년 타임지(Time)가 발표한 최고의 발명품으로 선정되기도 했다.

▲치타 로봇, 눈을 달다 (출처: YTN 사이언스)
‘치타(Cheeta)’는 4족 보행 로봇으로 치타의 특징을 본 따 개발됐다. 로봇 치타는 동물 치타와 같이 빠르게 걷고 뛸 수 있을 뿐만 아니라 1m 높이의 장애물도 뛰어넘을 수 있다.
로봇 치타는 야간 및 조명이 없는 곳에서도 작업할 수 있기 때문에 유해 물질이 남아 있는 사고 현장이나 위험한 작업장에 사람 대신 들어가 제품을 가져오거나 설비 안전 등을 점검하는 역할이 가능할 것으로 전망된다.
두더지 로봇, 화성 탐사에도 사용할 수 있을까?

▲땅을 파는 두더지의 특성을 딴 ‘몰 봇(두더지 로봇)’ (출처: YTN 사이언스)
두더지의 특성을 딴 생체모방 로봇도 있다. 지난 6월 명현 카이스트(KAIST) 전기 및 전자공학부 교수와 도시로봇연구소(KAIST Urban Robotics Lab) 연구팀은 일명 ‘두더지 로봇’으로 불리는 ‘몰 봇(Mole-bot)’을 개발했다.
몰 봇은 석탄층에 포함되어 있는 메탄가스(CBM, Coalbed Methane)나 희토류 등이 매설된 지역의 지하자원, 더 나아가 우주 행성의 표본 채취를 효율적으로 탐사하기 위해 개발됐다.
명 교수팀은 다양한 종류의 두더지의 장점만 모아 ‘몰 봇’을 개발했다. 먼저 굴착 작업은 두더지 종의 하나인 ‘치젤 투스(Chisel tooth mole)’를 모사했다. 치젤 투스가 이빨로 땅을 파고 들어가는 특징은 몰 봇이 굴착 작업을 할 수 있는 ‘드릴링 기술 메커니즘’에 적용됐다.
과거 굴착 작업은 시추기와 파이프라인, 펌프 등 다양한 전문 장비가 결합되어야 가능했지만 몰 봇의 개발로 인해 이 모든 과정이 단순화되고 보다 안정적인 시스템을 제공하게 됐다.
몰 봇의 하부는 또 다른 두더지 종인 ‘휴머럴 로테이션(Humeral rotation mole)’의 특징을 가져왔다. 몰 봇의 잔해 제거 기능은 땅을 파고 남은 잔해를 말끔하게 제거하는 휴머럴 로테이션의 특수한 어깨 구조에 따른 강력한 앞발 능력을 모사한 것이다.
허리 부분은 땅속에서도 자유롭게 방향을 바꾸는 두더지의 생물학적인 특징에서 아이디어를 얻었다. 몰 봇의 허리는 굴착 작업을 하는 앞 몸체와 이동 및 고정 역할을 하는 뒷 몸체를 선형 구동기로 연결해 땅속에서도 자유롭게 방향 전환이 가능하다.
몰 봇은 지름 25㎝, 길이 84㎝ 몸체에 무게는 26㎏로 기존 지하자원 탐사 로봇보다 작고 경제성도 뛰어난 것으로 알려졌다. 몰 봇이 상용화되면 우리 국산 기술로 만들어진 생체모방 로봇이 달이나 화성 땅속을 누비는 꿈만 같은 일이 현실로 구현될 전망이다.
 ▲코끼리의 코를 닮은 핸들링 시스템 (출처: Festo)
▲코끼리의 코를 닮은 핸들링 시스템 (출처: Festo)
생체모방 기술은 날카로운 이빨이나 발톱도 없고, 몸의 색을 변화시키는 능력도, 재빨리 달리는 재주도 없었던, 하드웨어만 보자면 나약해 보이는 인간이 척박한 자연환경 속에서 스스로 살아남기 위해 자연스럽게 터득한 생존법칙이었을 것이다.
앞으로 동물형 생체모방 기술은 로봇에 인공지능(AI)을 탑재하는 형태로 더 발전될 것으로 전망된다. 미래의 호모 사피엔스는 동물의 장점만을 흡수해 이용하는 가장 막강한 힘을 가진 종으로 세상에 기억될지도 모르겠다.
※ 이 칼럼은 해당 필진의 개인적 소견이며 삼성디스플레이 뉴스룸의 입장이나 전략을 담고 있지 않습니다.
