

물은 생명의 원천이다. 물이 있다는 것은 생명체가 존재할 가능성이 높다는 것을 의미한다. 지구의 70%를 차지하는 바다는 무한한 자원의 보고이자 생명의 근원이다. 이 수중 세계를 어떻게 개발하고 개척할 수 있을까? 수중 로봇의 개발은 이러한 호기심에서 출발한다. 인간이 진입할 수 없는 공간에 기계를 투입해 탐사를 시작한 것이다. 수중 탐사 로봇은 커다란 잠수정에서 최근에는 물고기 등을 닮은 생체 모방형 로봇으로, 해양 오염을 방지하는 플라스틱 먹는 청소부로, 우주 탐사를 위한 수중 로버(aquatic rover)로 다양한 영역에서 그 모습을 달리하며 우리 곁으로 다가오고 있다.
새로운 형태의 로봇으로 진화 중인 수중 탐사 로봇
‘수중 탐사 로봇’은 수중 자산 및 환경에 접근하기 위해 상업적·과학적 활용 목적을 가지고 개발된 로봇을 말한다. 수중 로봇은 사람이 진입하기 어려운 심해나 조류와 기상 조건 등으로 진입이 어려운 지대에서 인간이 해야 할 일을 수행하고 있다.
수중 탐사 로봇은 해저 6000m까지 들어가 해저 지형 탐사와 광물 채취 임무 수행, 바닷속에 잠겨있는 희귀 유물을 찾아내는 업무도 하기도 한다. 최근 수중 탐사 로봇은 북극으로 진출했다. 북극의 두꺼운 해빙 아래서 수중 로봇들은 활발한 탐사 활동을 벌이고 있다.
수중 탐사 로봇, 지구의 끝에서부터 우주까지 생명의 비밀 밝힌다!
NUI(Nereid Under Ice) 수중 로봇은 인간이 접근하기 가장 어려운 곳 중 하나인 북극 바다 해저를 탐사하는 임무를 맡았다. 우즈홀 해양 연구소(WHOI)는 지난 5월 NUI 로봇이 사상 최초로 자동 수중 샘플링 작업을 완료했다고 밝혔다. 해당 로봇은 미 우주항공우주국(NASA)의 행성 과학 및 기술을 연계해 개발하고 있다. NUI 로봇은 그리스 산토리니 섬 해저 활화산인 콜롬보 화산에서 북극 해저 바닥에서 자라고 있는 희귀한 해저 자원에 대한 생생한 영상을 전송한다.
약 1,800kg의 무게를 지닌 타원형 형태의 NUI 로봇은 인공지능(AI) 소프트웨어가 탑재되어 자율 주행하도록 설계됐다. 수중 로봇은 육지 표면을 다니는 로봇보다 더욱 정교한 설계가 필요하다. 해상 환경은 포장된 육지의 도로와는 달리 불규칙적이며 어떤 불확실한 변수가 일어날지 알기 어렵기 때문이다. NUI 로봇의 인공지능 소프트웨어는 이러한 변수에 대응하여 자율 주행할 수 있도록 돕는다. NUI 로봇은 우리가 과거에는 전혀 불가능했던 3차원 방식의 탐사를 수행함으로써 앞으로 인류에게 북극 바다 얼음 해저에서 무슨 일이 일어나고 있는지를 알 수 있도록 도움을 줄 것으로 기대된다.

▲북극 해저 탐사 로봇인 ‘NUI(Nereid Under Ice) 수중 로봇’ (출처: Scientific American 유튜브)
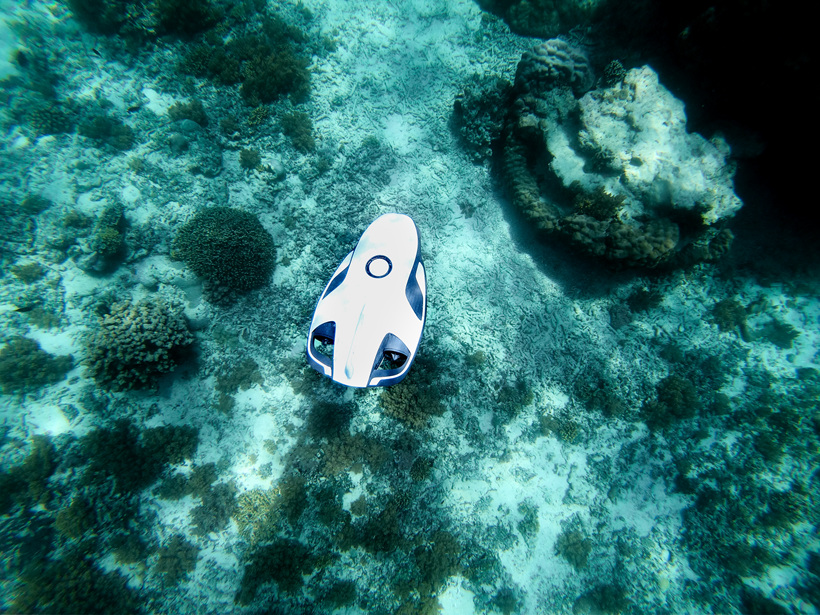
바닷속 해저 탐사, 희귀 자원 탐사 등의 역할을 담당해 온 수중 로봇이 최근에는 조류가 강하거나 어구, 선박의 닻 등의 장애물로 인해 사람이 직접 접근하기 어려운 수중 건설 작업에 투입되고 있다.
수중 건설 작업은 배관 매설, 해저 면 정리 등 다양한 형태의 해저 관로 공사가 필요하다. 하지만 기상 악조건 및 다양한 해양 장애물로 인해 사람들이 작업하는 데 많은 어려움을 겪어왔다. 수중 로봇은 이러한 조건에 상관없이 장애물을 직접 쉽게 처리할 수 있어 차세대 사업 아이템으로 두각을 나타내고 있다.
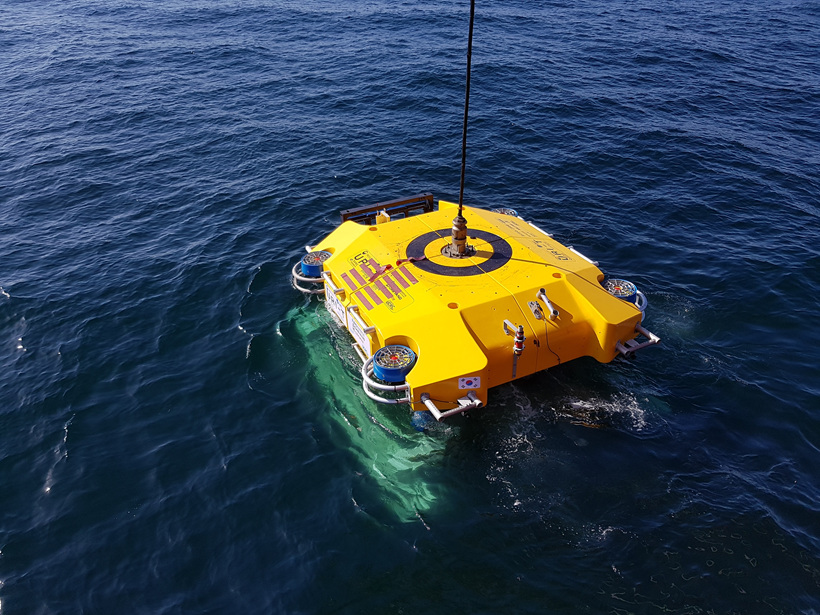
▲해저 케이블 매설 로봇 ‘URI-T’가 수중 작업을 마친 뒤 물 밖으로 나오는 모습 (출처: 한국해양과학기술원 제공)
현재 국내에서 맹활약 중인 수중 건설 로봇 URI-L, URI-T, URI-R 은 여러 외부 조건과 상관없이 장애물을 처리하고 공사를 진행하고 있어 눈길을 끌고 있다. 해양수산부와 한국 해양과학기술원이 함께 개발한 이 수중 건설 로봇은 지난 7월부터 경남 거제시 해저 상수관 매설 공사에 투입되어 2.3km에 달하는 구간의 매설 공사를 진행하고 있다.
이 수중 건설 로봇은 크게 ‘경작업용 로봇(URI-L)’, ‘중작업용 로봇(URI-T)’, ‘트랙 기반 중장업용 로봇(URI-R)’으로 구성됐다. 경작업용 로봇 ‘URI-L’은 수중 환경 조사 및 맵핑 작업, 수중 구조물 절단 및 작업 지원을 할 수 있도록 설계됐다. 로봇 ‘URI-T’는 워터젯(Water jet)을 이용해 해저 면을 굴착하고, 매설된 케이블 등을 탐지하는 기능을 탑재했다. 트랙 기반 중작업용 로봇 ‘URI-R’은 단단한 암벽도 깰 수 있는 파쇄기와 쇠톱 형태의 트랜칭 커터 등의 작업 기구를 모듈형으로 탑재해 여러 작업 기구를 교체할 수 있어 매설 작업에서 뛰어난 기능을 보여주고 있다.
다양한 형태로 개발되고 활용되는 수중 로봇
해양 쓰레기 문제는 날이 갈수록 심각해지고 있다. 우리나라와 가장 가까운 북태평양의 거대 쓰레기 섬의 면적은 한반도의 약 7배에 달한다. 이 섬의 99%는 플라스틱이며 전체의 94%는 미세 플라스틱인 것으로 나타났다.
앞으로 수중 로봇이 해야 할 중요한 임무 중 하나는 플라스틱 파편 조각이 바다를 떠돌면서 해양 생태계를 파괴하지 못하도록 하는 것이다. 이 역할에 충실한 수중 로봇이 바로 네덜란드 로테르담에서 플라스틱을 수거하는 ‘폐기물 상어’(Waste Shark)다.

▲해양에 떠다니는 플라스틱을 수거하는 ‘폐기물 상어 로봇 (Waste Shark)’ (출처: Tech Insider 유튜브)
이 수중 청소 로봇은 바다에서 쓰레기를 모으는 자율적인 장치를 탑재하고 있다. 폐기물 상어는 수거 장소로 돌아가기 전에 500kg 상당의 쓰레기를 모은다. 이 로봇은 스스로 바다 수질과 경로를 탐색하고 효율적으로 바다 표면에 퍼져있는 쓰레기를 모을 수 있는 수거 경로를 찾고, 수면 아래 35cm의 입구를 통해 바다 표면 해양 쓰레기를 수거할 수 있다. 현재 네덜란드 로테르담에는 실제로 폐기물 상어 로봇이 해양 플라스틱 제거에 힘쓰고 있다.
수중탐사 로봇은 다양한 형태로 개발, 진화되고 있다. 수중 로봇의 형태는 예측이 어려운 해상 조건으로 자연에 융화될 수 있도록 동물과 흡사한 형태의 생체 모방형 로봇으로 만들어지기도 한다. 오징어, 가오리, 상어와 같은 물고기 형태의 모습의 수중 로봇이 그것이다.
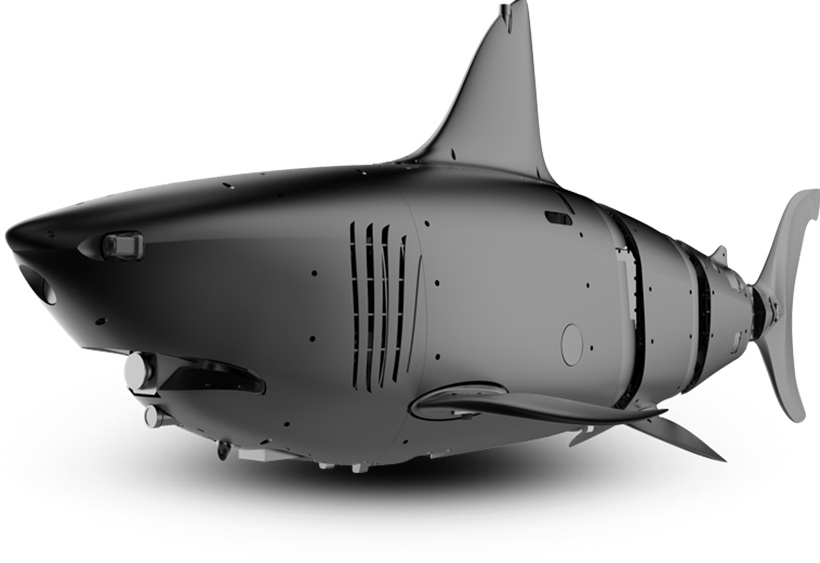
▲상어의 움직임과 형태를 모방한 ‘로보 샤크(Robo-Shark)’ (출처: Robosea사)
지난 2018년 미국 라스베이거스에서 열린 CES에서는 상어 형태의 수중 로봇인 ‘로보 샤크(Robo-Shark)’가 대중들에게 공개됐다. 중국 수중 로봇 업체 로보씨(Robosea) 사는 상어의 움직임과 형태에서 영감을 받아 이 상어 로봇을 제작했다. 약 1.8m의 작은 외형을 가진 로보 샤크는 카메라, 센서, 통신장비, 스캐너 등을 탑재하고 자율적으로 운행하도록 설계됐다. 수중 환경에 최적화된 생체 모방 로봇으로 수중 군사 장비 탐지 및 비밀 정찰 활동에도 효과적으로 활동할 수 있도록 개발됐다.

▲오징어의 움직임을 모사해 만든 수중 로봇 (출처: IEEE Spectrum)
오징어를 닮은 생체 모방 로봇도 있다. 중국 북경항공항천 대학(Beihang University) 등이 연합한 중국 연구팀은 지난해 오징어 로봇을 개발하는 데 성공했다. 이들은 지난해 캐나다에서 열린 ‘ICRA 2019’에서 모핑 지느러미와 팔을 가진 오징어 모양의 로봇을 선보였다. 이 오징어 로봇은 진짜 오징어와 같은 방식으로 주행한다. 오징어가 로켓처럼 앞으로 솟아오르며 전진하는 것처럼 오징어 로봇은 제트 엔진처럼 압축된 공기를 분사하는 방식으로 상승하며 움직인다. 이러한 생체 모방형 수중 로봇은 각 해양 생물의 모습을 모사하여 해양 환경에 맞는 기능을 보여준다.
생체 모방형 수중 로봇은 자율 유영을 통한 제어기술, 조류나 기상 여건, 장애물 등의 핵심 기술이 아직 더 연구가 필요한 분야이기도 하다. 생체 모방형 수중 로봇은 수중 탐사와 스파이 기능 등 다양한 영역에 활용 가능하다. 미국, 일본, 중국 등 주요 국가들은 해양자원 개발 및 군사작전을 위한 수중 로봇 개발에 적극적으로 나서고 있다.
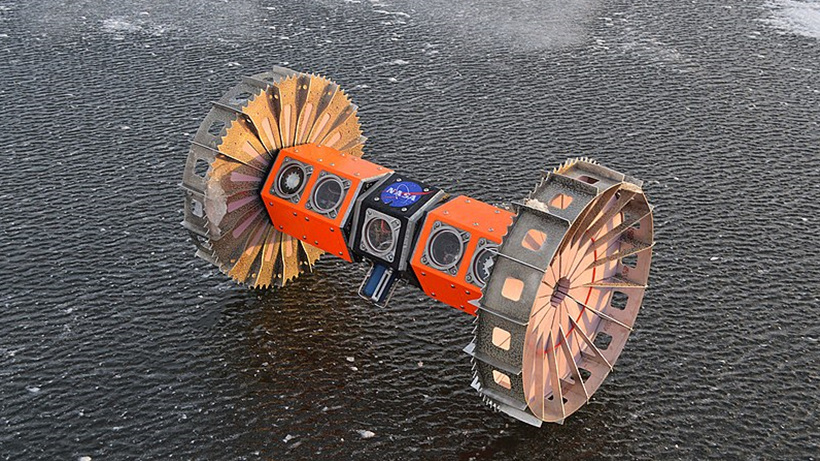
▲목성의 위성 유로파 탐사를 위한 수중 탐사 로봇 ‘브루이(BRUIE)’ (출처: 위키피디아)
군사적인 목적 외에도 수중 탐사 로봇을 개발하려는 이유는 많다. 최근 수중 탐사 로봇은 우주를 향하고 있다. 목성 주변 위성 중 하나인 유로파(Europa) 탐사를 염두에 두고 2014년부터 개발한 수중탐사 로봇 ‘브루이(BRUIE)’가 대표적이다.
1610년 갈릴레오 갈릴레이가 발견한 유로파는 목성의 4대 위성 중에서는 가장 작은 것으로 알려졌다. 태양계에서 지구와 같은 생명체의 존재 가능성이 가장 높아 기대가 큰 위성이기도 하다. 유로파는 단단한 얼음 껍데기가 표면을 둘러싸고 있는 얼음덩어리다. 이 얼음층 밑에는 100km가 넘는 깊이의 거대한 바다가 숨겨져 있을 것으로 추정되고 있다. 이에 따라 미국 항공우주국(NASA)의 제트 추진 연구소(JPL)는 유로파에서 생명체를 확인하기 위해 수중 로버(이동 탐사 로봇) ‘브루이(BRUIE)’를 개발했다. 브루이는 앞으로 유로파 탐사선 클리퍼의 대기 탐사 작업이 선행된 후 유로파로 떠나 생명체 여부를 탐사할 예정이다.
인간의 빅 퀘스천의 시작, 수중 탐사 로봇의 미래

지구 끝 해저 자원 탐사에서부터 저 멀리 우주까지 수중탐사 로봇의 역할이 점점 확대되고 있다. 앞으로 수중 탐사 로봇 산업은 한 국가의 에너지, 해양플랜트, 해저 탐사, 군사적 목적은 물론 우주 탐사에 이르기까지 다양한 영역에서 미래 성장 동력을 확보할 수 있는 중대한 산업으로 성장할 것으로 전망된다.
바다는 아직 인류가 일부밖에 개척하지 못한 미지의 세계다. 무궁무진한 자원과 자료가 바닷속에 담겨있다. 지구의 바다뿐만 아니라 유로파와 같은 우주의 ‘바다’도 마찬가지다. 목성의 위성인 유로파의 발견이 우리에게 큰 희망을 주는 것은 유로파 얼음 껍데기 밑에 바다가 흐르고 있을 것이라는 예상 때문이다. 물은 생명의 원천이다. 수중 탐사 로봇 개발은 바로 그 생명의 근원을 묻는 ‘빅 퀘스천’(Big Question)의 시작점이 될 것이다.
※ 이 칼럼은 해당 필진의 개인적 소견이며 삼성디스플레이 뉴스룸의 입장이나 전략을 담고 있지 않습니다.
